
Surveyors have developed different methods, based on separate control networks, for measuring horizontal and vertical positions. A horizontal position is the location of a point relative to two axes: the equator and the prime meridian on the globe, or the x and y axes in a plane coordinate system.

We will now introduce two techniques that surveyors use to create and extend control networks
- triangulation
- trilateration
The two other techniques used to measure positions relative to control points are
- open traverse
- closed traverse
Traversing
Surveyors usually determine positions in series.A traverse consists of series of straight lines of known length related to one another by known angles between the lines. Starting at control points, they measure distances and angle to new locations, and then use trigonometry to calculate positions in a plane coordinate system. With a known starting position (or two known starting positions) repeating this process through a chain of points allows the position of each point to be calculated. Determining series of positions in this way is known as “running a traverse”.

A traverse that begins and ends at different locations, in which initial point is known and final point is at unknown location is called an open traverse. A traverse that begins and terminates at the same point, or at two different but known points is called a closed traverse. By “closing” a route between one known location and another known location, the surveyor can determine errors in the traverse.

Measurement errors in a closed traverse that connects at the point where it started can be calculated by adding the interior angles of the polygon formed by the traverse, but in an open traverse the error can not be determined. Therefore closed traversing is more reliable.
Triangulation
In the past it was a difficult task to measure very long distances accurately, but it was possible to accurately measure the angles between points many kilometres apart. This could be anywhere from a few kilometres to 50 kilometres or more.
Triangulation is a technique that measures the angles in a triangle formed by three survey control points. By using trigonometry and the measured length of just one side, the other distances in the triangle are calculated.

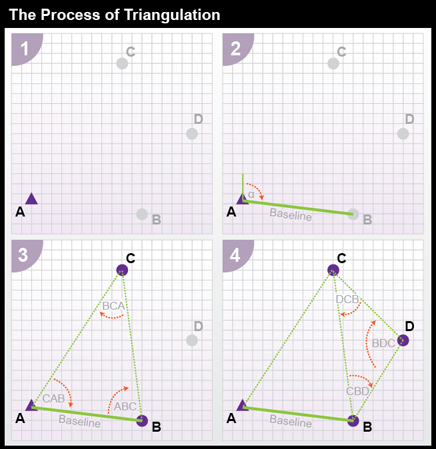
- By using a total station equipped with an EDMI, we measure the azimuth alpha and the baseline distance AB.
- These two measurements let us calculate the position of B as in an open traverse.
- Now we measure the interior angles CAB, ABC, and BCA at points A, B, and C. By knowing the the baseline length and interior angles, the trigonometric “law of sines” can then be used to calculate the lengths of other sides. By knowing these lengths, we can now fix the position of point C.
- Now we have the length of side BC. This calculated length then serves as a baseline for triangle BDC. Triangulation is therefore used to extend control networks, point by point and triangle by triangle.
Trilateration
An alternative to triangulation is trilateration. When methods of measuring long distances (usually 30 to 50 km) were introduced, then the distances in the triangle could be measured directly instead of calculating them from the measured angles. Trilateration is thus easier to perform, requires fewer tools, and is therefore less expensive. The process of determining positions through the chain of triangles is then the same as for triangulation.

Try this: process of trilateration




the process of trilateration
Once a distance from a control point is established, a person can calculate a distance by open traverse. A single control point and known distance limits the possible locations of an unknown point to the circumference of the circle surrounding the control point at that distance; there are infinitively many possibilities along this circle for the unknown location. The addition of a second control point introduces another circle with a radius equal to its distance from the unknown point. With two control points and distance circles, the number of possible points for the unknown location is now diminished to exactly two. The third and the final control point can be used to identify which of the remaining possibilities is the true position.
Trilateration is considerably simpler than triangulation. Even with very rough estimates, one can determine a general position with appreciable success.
GPS
Global Positioning System is developed by U.S. Defense department and is called Navigational System with Time and Ranging Global Positioning System (NAVSTAR GPS) or simply GPS.
GPS is a satellite based navigation system. Based on the constellation of 24 satellite. It can provide accurate positioning 24 hours a day, anywhere in the world.

All 24 satellites are divided into six parts and every part contains four satellites. There is a definite orbit for each part.

How it Works?
- Satellites have accurate atomic clocks and all 24 satellites transmits the same time signal at the same time.
- Satellite signal contains information that includes:
—->satellite number
—->time of transmission
- Receiver use an almanac (a file which contains positional information for all of the GPS satellites) that includes:
—->position of all satellites every second
- The satellite signal is received, compared with the receiver’s internal clock, and use to calculate the distance from that satellite.
- Trilateration is used to determine location from multiple satellite signals.
Things we need to determine:
- Current location of GPS satellites.
- The distance between receiver’s position and GPS satellites.

1. Current location of Satellite
GPS satellites are orbiting the earth at an altitude of 11,000 miles. The orbits and location of the satellites are known in advance. GPS stores this orbit information for all of GPS satellites in an Almanac.
2. Distance between receivers position and satellite
By measuring the amount of time taken by the GPS signal to travel from the satellite to the receiver. Radio waves travels at speed of light that is about 186,000 miles per second.
The distance between the satellite and the receiver can be determined by the formula: distance =speed*time difference
Why four satellites?

- From one satellite the position could be anywhere on the sphere.
- From two satellites the position is anywhere on the circle where spheres intersect.
- From three satellites position is at one of the two locations where all the three spheres intersect.
- By using four satellites location in 3-Dimension (horizontal+elevation) could be determined.
Sources of Error and Amount of Error
- Satellite clocks (1.5 to 3.6 meters)
- Orbital errors (lesser than 1 meter)
- Ionosphere (5.0 to 7.0 meters)
- Troposphere (0.5 to 0.7 meters)
- Receiver noise (0.3 to 1.5 meters)
- Multipath (0.6 to 1.5 meters)
- User error (upto kilometer or more)

Orbital Error
GPS receivers calculate coordinates relative to the known locations of satellites in space, a complex task that involves knowing the shapes of satellite orbits as well as their velocities. The GPS Control Segment monitors satellite locations at every time, calculates orbit eccentricities, and compiles these deviations in documents called ephemerides.

Atmospheric Delay
As a signal passes through the charged particles of the ionosphere and then through the water vapour of troposphere it gets slowed and this creates the same kind of error as bad clocks.

Multipath Error
Signal that bounces of a smooth object and hits the receiver antenna, increases the duration of time for a signal to reach the receiver.

Receiver Error
Error in the GPS receiver’s measurement of range caused by thermal noise and software accuracy.
